
Roboter
Über die Jahre sind viele Roboter entstanden, die jeweils ganz unterschiedlichen wissenschaftlichen Fragestellungen gewidmet wurden. Trotz der Vielfalt (oder vielleicht sogar gerade durch die Vielfalt) haben sich einige zentrale Konzepte herauskristallisiert, die wir als essentiell betrachten und die wir kompromisslos in unserem aktuellsten humanoiden Roboter Myon vereint haben.
Myon

Im Rahmen des europäischen Projekts ALEAR wurde der modulare Roboter Myon unter dem Entwicklungsnahmen M-Serie vollständig in unserem Labor konzipiert, entwickelt und gebaut. Myon besteht aus fünf gleichartigen humanoiden Robotern. Durch die intensive Zusammenarbeit mit Frackenpohl Poulheim und Bayer MaterialSciene konnten Myon und seine vier Artverwandten eine Außenhaut erhalten, die sowohl rationale (Sturzschutz, Griff-Flächen) als auch emotionale (Akzeptanz, Abbau von Ängsten) Funktionen erfüllt.
(weitere Details)Semni

Auf ägyptisch bedeutet Semni wörtlich sich etablieren – und genau das ist das Ziel des Selbst-Explorierenden Multi-Neuronalen Individuums (Self-Exploring Multi-Neural Individual). Semni ertastet auf behutsame Weise sich selbst und seine Umwelt, findet heraus welche motorischen Aktionen effizient sind und welche unerhört viel Energie kosten. Mit der Zeit probiert Semni zunehmend akrobatischere Bewegungen aus, er hat Lust auf eigene Körperbeherrschung.
A-Serie

Die aus fünf Robotern bestehende A-Serie basiert auf dem Baukastensystem Bioloid der Firma Robotis und wurde um speziell entwickelte AccelBoards erweitert, die auf verteilte Weise sensomotorische Daten verarbeiten können. Die AccelBoards sind an verschiedenen Körperextremitäten des Roboters befestigt, so dass die unterschiedlichen Körperregionen sensorisch erfasst werden können.
Oktavio

Die Laufmaschine Oktavio besteht aus einem Rumpf und acht identisch aufgebauten Beinen, die per Schnappverschluss am Rumpf befestigt werden. Der von Dr. Manfred Hild und Torsten Siedel gemeinsam entwickelte und gebaute Roboter ist 150cm lang, 100cm breit und 30cm hoch. Mit Oktavio entstand das erste verteilte System, das ohne zentrale Recheneinheit auskommt. Wesentliche Konzepte von Oktavio kommen in weiterentwickelter Form beim Myon zum Einsatz.
Do:Little

Wegen seiner akustischen Kommunikationsfähigkeit erhielt der Do:Little seinen Namen in Anlehnung an Eliza Doolittle aus Shaws Pygmalion. Der Do:Little beherrscht nicht nur das Richtungshören – er besitzt darüber hinaus auch ungewöhnliche gustatorische und propriozeptive Sensoren. Über bronzefarbene Federkontakte an der Vorderseite und silberfarbene Kontaktbahnen rund um den Körper können mehrere Do:Littles sich mit Energie aushelfen und dies auch wahrnehmen.
TED

Das Akronym TED steht für Two-degrees-of-freedom Experimental Device (Experimentalaufbau mit zwei Freiheitsgraden) und bezeichnet einen in jeder Hinsicht minimal gehaltenen Roboter, der sich dennoch auf Beinen zielgerichtet fortbewegen kann. TED entstand primär als Anschauungs- und Experimentalobjekt. Man benötigt nur wenige Einzelteile, um an einem Nachmittag selbst einen TED zusammenzubauen, individuelle Beinformen zu biegen und sein selbst kreiertes neuronales Netz aufzuspielen.
Universalgreifer
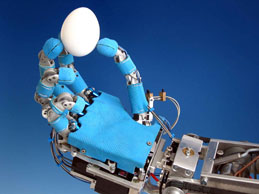
Der von Torsten Siedel nach dem Vorbild seiner eigenen Hand entwickelte und von Dr. Manfred Hild um Elektronik und neuronale Steuerung erweiterte Universalgreifer ist intuitiv mit einem speziell angefertigten Datenhandschuh steuerbar und verfügt über ein haptische Rückkopplung: man spürt es mit der eigenen Hand, wenn der Universalgreifer etwas ertastet und festhält.